光明日报:天津大学研制出3D打印软性机器人,可应用于人工肌肉
一只灵巧的尺蠖,牢●牢地抓住圆形管,一伸一缩中蜿蜒前行。事实上,这只灵活的尺蠖是一款采用了天津大学研发的一种新型模块化柔性驱动方法,用3D打印机直接“打印”出来的软性机器人。
软性机器人因其较高的柔性和对人体安全等优点,在近几年得到了持续广泛的关注。而3D打印的优势就是制造复杂形体、复杂结构而且不需要后续加工,可一次成型。
打印免组装结构,是3D打印技术制造软性机器▅人近年来一个比较典型的应用。
近日,天津大学左思洋、刘建彬课题组提出了一种基于薄膜气缸的新型模块化柔性驱动方法,并通过根据具体应用改变排列组合方式以及合理布置连接方案,将其应用于人工肌肉和管道爬行机器人中。
该方法基于一次3D打印成型的制造技术,省掉了传统ω 机电设备加工制造中的装配流程,大幅降低了驱动模块的制造成本和周期,且具备耗气量小、动态响应高、可靠性高、对应用场景适应性强等特点。
该成果2021年1月初在线发表在《美国电气电子工程师学会机器人和自动化快报( IEEE Robotics and Automation Letters)》上。
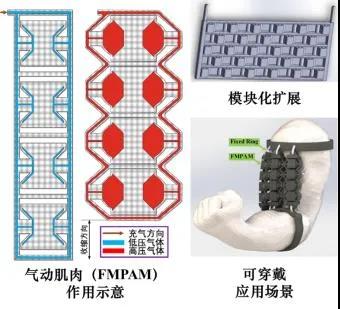
基于薄膜气缸的新型气动人工肌肉设计理念及其应用场景
“每一个薄膜气缸就好比人体的一小块肌肉,或者爬虫的一个‘节’,只不过是用热塑性聚氨酯材料做的。”刘建彬解释说,采用这种新型薄膜气缸结构是团队的“奇思妙想”。
如果把这个结构比喻成一个基本的肌肉单元,那根据不同的应用需求再对这些单元的连接方式进行排列组合和布局连接,就像是把一个个的肌肉单元连接起来形成一整块肌肉,然后再应用于不同场景,而整块“肌肉”的制造过程则采用了3D打印技术,一次成型。
基于此创意,课题组首先提出了一种新型气动人工肌肉,可应用于柔性外骨骼等人机交互装备的驱动中。气动即以压缩空气为动力源,带动机械完成伸缩或旋转动作。
与传统气动人工肌肉相比,该设计最突出的特点是不会产生厚度方向的膨胀,从而避♂免了对人体的挤压。
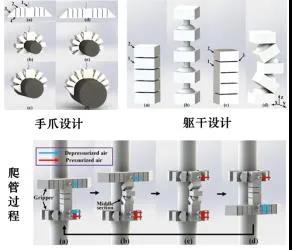
基于薄膜气缸的管道爬行机器人设计理念
此外,课题组还提出了一种新型气动管道爬行机器人,可应用于工业管道设施的检查和实时监控。该管道爬行机器人采用仿生尺蠖原理,通过巧妙布置薄膜气缸单元之间的连接,实现机器人在管道内、外壁面爬行。
柔性驱动方式的应用使该机器人能够适应大范围管道直径的变化,并可应对直管、弯管、竖管、水平管以及各种角度倾斜管应用场景,同时机器人可承受自重80倍以上负载。
因为采用了气动的方法驱动,软性机器人只能拖着长长的气管尾巴工作。如果将传感器集成到设备中,也就能去掉这些气管尾巴,使机器人更独立精致。这也是科学家们未来的努力方向。
(光明日报全媒体记者 刘茜 陈建强 通讯员 刘晓艳)
光明日报:https://mp.weixin.qq.com/s/hKyfFxqJ9EMFAmSGhKdU_w
(编辑 陈可)
未经允许不得转载:二九年华大学门户 » 光明日报:天津大学研制出3D打印软性机器人,可应用于人工肌肉
相关推荐
- 天津大学召∩开2020年学科建设工◣作会议
- 天津大学校7家机构入选天津市普通高等学校社会科学实验室
- 天津大学陈焱教授获第十六届中国青年科技奖
- 天津大学2019级本科生、预科生开学典礼╳隆重举行
- 光明日报客户端:医工融合 三医院挂牌天津大学直属医院
- 海报新闻:王晓晶:让天津大学培养出来的人才适合滨州、选择滨州、建设滨州
- 李家俊一行到地科院和纳米中心调研
- 我校英国校友会积极募捐购买医疗物资支援疫区
- 11月30日校报推介:我校召开大会推进主题教育整改落实、我校“五育”之德育、智育追溯、我校“五育”之体育、美育、劳动教育追溯
- 练好内功,用“心”战“疫” ——天津大学举行2020年学工队伍“培训第一课”
- 人民日报:改革开放再出发的强大精神动力(深入学习贯彻习近平新时代中国特色社会主义思想)
- 天津大学举行网络安全宣传系列活动
- 颜晓峰:新冠肺炎疫情防控若干问题的理论思考
- 人民日报:天津大学建校125周年主题活动发布
- “新文科”来了!法学教育创新发展路在何方?
- 天津日报:守初心使用 育万千桃李——记2019年全国模范教师、天津大学教授张维
- 津云:李鸿忠为市委法律顾问颁发聘书并座谈
- 抗战胜利纪念日 天大学▂子激扬爱国正能量
- 【聚焦第三次科技工作会议】重点研发↑计划政府间国际科技合作项目预申报书指导会召开
- “我深深感受到天大的温暖和校友的厚爱”
新闻公告
- 天津大学召开2020年度学生工作队伍总结表彰会 01-24
- 沉痛悼念我国著名建筑学家、建筑教育家聂兰生教授 01-21
- 科学网:万里长城讲述战争与和平的故事 01-20
- 科学网:万里长城讲述战争与和平的故事 01-20
高考招生
- 天津大学2018年招生章程 08-05
- 天津大学2015年招生章程 08-05
- 天津大学2016年招生章程 08-05
- 天津大学2017年招生章程 08-05
- 天津大学2012年全日制本科╲招生章程 08-05
- 天津大学2013年招生章程 08-05
- 天津大学2011年全日制本科招生章程 08-05
- 天津大学2007年全日制本科招生章程 08-05
- 天津大学2008年全日制本科招生章程 08-05
- 天津大学2009年全日制本科招生章程 08-05